HW3 <<
Previous Next >> NX API
ANSI C
修改啟動黨,加入tcc。
set path_portablegit=%Disk%:\Portablegit\bin;
set path_julia=%Disk%:\julia-1.5.2\bin;
set path_tcc=%Disk%:\tcc\;
path=%Disk%:;%path_python%;%path_portablegit%;%path_julia%;%path_tcc%;%path%;
執行下列程式碼。
/* Runge Kutta for a set of first order differential equations */
#include <stdio.h>
#include <math.h>
#define N 2 /* number of first order equations */
#define dist 0.1 /* stepsize in t*/
#define MAX 30.0 /* max for t */
FILE *output; /* internal filename */
FILE *output1; /* internal filename */
// 利用 pipe 呼叫 gnuplot 繪圖
FILE *pipe;
void runge4(double x, double y[], double step); /* Runge-Kutta function */
double f(double x, double y[], int i); /* function for derivatives */
void main(){
double t, y[N];
int j;
output=fopen("osc.dat", "w"); /* external filename */
output1=fopen("osc1.dat", "w"); /* external filename */
y[0]=1.0; /* initial position */
y[1]=0.0; /* initial velocity */
//fprintf(output, "0\t%f\n", y[0]);
for (j=1; j*dist<=MAX ;j++) /* time loop */{
t=j*dist;
runge4(t, y, dist);
fprintf(output, "%f\t%f\n", t, y[0]);
fprintf(output1, "%f\t%f\n", t, y[1]);
}
fclose(output);
fclose(output1);
pipe = popen("gnuplot -persist","w");
//fprintf(pipe,"set term png enhanced font \"v:/fireflysung.ttf\" 18 \n");
fprintf(pipe,"set term png enhanced font \"y:/wqy-microhei.ttc\" 18 \n");
//fprintf(pipe,"set yrange [68:70]\n");
fprintf(pipe,"set output \"test.png\"\n");
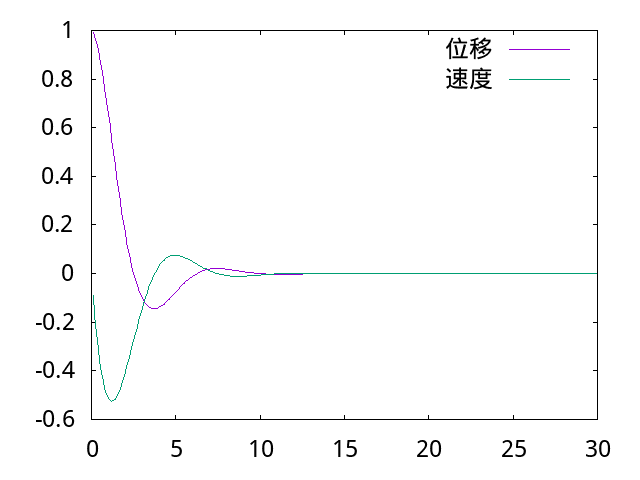
fprintf(pipe, "plot \"osc.dat\" title \"位移\" with lines, \"osc1.dat\" title \"速度\" with lines\n");
fprintf(pipe,"quit\n");
fprintf(pipe,"quit\n");
pclose(pipe);
}
void runge4(double x, double y[], double step){
double h=step/2.0, /* the midpoint */
t1[N], t2[N], t3[N], /* temporary storage arrays */
k1[N], k2[N], k3[N],k4[N]; /* for Runge-Kutta */
int i;
for (i=0;i<N;i++){
t1[i]=y[i]+0.5*(k1[i]=step*f(x,y,i));
}
for (i=0;i<N;i++){
t2[i]=y[i]+0.5*(k2[i]=step*f(x+h, t1, i));
}
for (i=0;i<N;i++){
t3[i]=y[i]+ (k3[i]=step*f(x+h, t2, i));
}
for (i=0;i<N;i++){
k4[i]= step*f(x+step, t3, i);
}
for (i=0;i<N;i++){
y[i]+=(k1[i]+2*k2[i]+2*k3[i]+k4[i])/6.0;
}
}
double f(double x, double y[], int i){
if (i==0)
x=y[1]; /* derivative of first equation */
if (i==1)
x=-y[0]-0.5*y[1];
return x;
}
阻尼=1
file
HW3 <<
Previous Next >> NX API