w7~w9 <<
Previous Next >> ANSI C
HW3
1.將檔案存成ASCII STL
2.更改ASCII STL solid name與xml檔中的joint相對應
3.調整顏色
xml檔程式碼
<robot_definition>
<robot_dk name=kmol_kr_162>
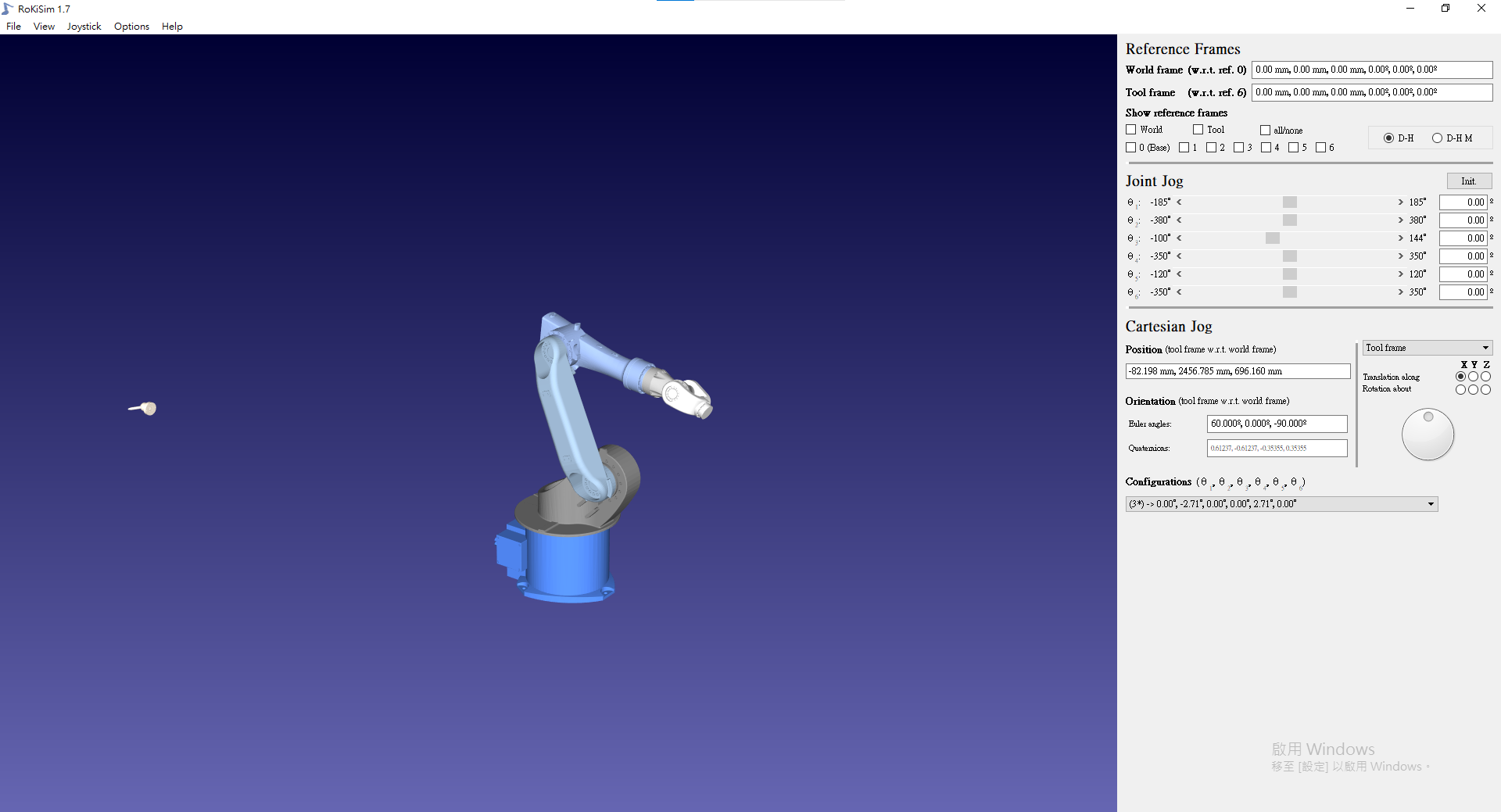
<axis id="Base" maxvalue="0" minvalue="0" alpha="0" a="0" theta="0" d="0"/>
<axis id="Joint1" limsup="185.000" liminf="-185.000" alpha="0.000" a="0.000" theta="90.000" d="640"/>
<axis id="Joint2" limsup="380.000" liminf="-380.000" alpha="90.000" a="-260" theta="0.000" d="0.00"/>
<axis id="Joint3" limsup="144.000" liminf="-100.000" alpha="0.000" a="1300.000" theta="-90.000" d="0.000"/>
<axis id="Joint4" limsup="350.000" liminf="-350.000" alpha="-90.000" a="-55.000" theta="0.000" d="1025.000"/>
<axis id="Joint5" limsup="120.000" liminf="-120.000" alpha="90.000" a="0.000" theta="0.000" d="0.000"/>
<axis id="Joint6" limsup="350.000" liminf="-350.000" alpha="-90.000" a="0.000" theta="180.000" d="290.000"/>
</robot_dk>
<robot_geometry>
<geometry geo="kr16 - kuka kr16 assembly-1 base-2" name="Base" />
<geometry geo="kr16 - kuka kr16 assembly-1 rotary head-2" name="Joint1"/>
<geometry geo="kr16 - kuka kr16 assembly-1 lower arm-2" name="Joint2"/>
<geometry geo="kr16 - kuka kr16 assembly-1 upper arm-2" name="Joint3"/>
<geometry geo="kr16 - kuka kr16 assembly-1 p2-2" name="Joint4"/>
<geometry geo="kr16 - kuka kr16 assembly-1 WRIST-2" name="Joint5"/>
</robot_geometry>
<CAD_base x="0.000" y="0.000" z="0.000" rx="0.000" ry="0.000" rz="0.000"/>
<CAD_scale FACTOR="1.000000000"/>
<CAD_offsets cad_theta1="0.000" cad_theta2="0.000" cad_theta3="0.000" cad_theta4="0.000" cad_theta5="0.000" cad_theta6="0.000"/>
<Angle_Type id="1"/>
</robot_definition>
檔案
w7~w9 <<
Previous Next >> ANSI C